Суть темы - в вопросе, поставленном в заголовок. Приводится сравнение с реостатным регулированием.
Идея пуска асинхронного привода при пониженном напряжении давно получила свое развитие и реализацию. Самый распространенный пример – пуск с переключением схемы соединения обмоток со «звезды» в «треугольник».
Во время пуска в «звезде» на каждую обмотку двигателя приходится меньшее напряжение, пусковой ток ограничивается и привод входит в работу в наиболее благоприятных условиях. Схожий эффект можно обеспечить и без снижения напряжения – выведением сопротивлений пускового реостата в цепи фазного ротора асинхронного двигателя.
Но реостат в роторной цепи применяют и для регулирования скорости привода, работающего под нагрузкой. Чем больше сопротивлений введено в цепь, тем ниже скорость привода. И проявляется этот эффект тем ярче, чем в большей степени будет загружен приводной двигатель. Это легко можно увидеть из семейства искусственных механических характеристик при реостатном регулировании.
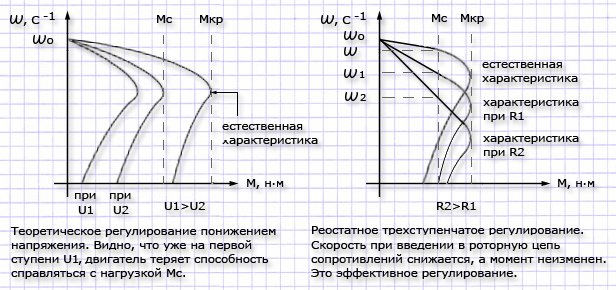
Почему же для регулирования скорости привода никогда не применяют понижение напряжения? Казалось бы – ведь все просто: понижаем величину питающего напряжения и регулируем скорость. Как и в случае с реостатным регулированием, скорость холостого хода при пониженном напряжении оставалась бы неизменной (смотрим характеристику), а вот под нагрузкой скорость привода бы снижалась.
По сути – это то самое технически трудноосуществимое регулирование скорости асинхронного привода, к которому все стремятся. Технически это можно было бы реализовать введением опять же, регулируемого реостата, но не в роторную, а в статорную цепь.
При этом на сопротивлениях происходило бы падение питающего напряжения. А можно было бы организовать двухступенчатое регулирование скорости популярным переключением обмоток статора со «звезды» в «треугольник» и обратно. Только осуществлять такое переключение пришлось бы не при пуске, а во время работы.
Однако такой способ регулирования скорости асинхронного двигателя не применяется. Дело в том, что механическая мощность двигателя – это произведение скорости вращения рабочего вала на его же момент вращения. Мощность, разумеется, снижается, если мы вводим сопротивления в роторную цепь или понижаем питающее напряжение. Но снижается она по-разному.
При включении сопротивлений в роторную цепь мощность двигателя снижается за счет скорости. Это удобно для регулирования: при постоянном моменте понижается скорость, а работоспособность двигателя сохраняется. Привод не теряет способности выдерживать номинальную нагрузку. Немного понижается КПД, но это недостаток, с которым в некоторых условиях вполне можно смириться.
Иное дело – понижение питающего напряжения. Мощность при этом понижается не только за счет скорости, но и за счет крутящего момента на валу. При понижении питающего напряжения в два раза момент двигателя снижается в четыре раза, то есть зависимость квадратичная.
Конечно, скорость привода при низком напряжении будет ниже, но момент на валу может снизиться до такой степени, что привод просто встанет. Именно поэтому, кстати, пуск при пониженном напряжении применяется только для приводов, имеющих возможность запуска при отсутствии нагрузки на валу.
Из-за резкого падения вращающего момента на валу регулирование скорости понижением напряжения для асинхронных двигателей нельзя считать эффективным. Схемы с включением сопротивлений в статорную цепь, подключением автотрансформатора и переключением со «звезды» на «треугольник» состоятельны только для пуска привода при отсутствии нагрузки.