 Известно, что пусковой ток асинхронного двигателя с короткозамкнутым ротором в 5-7 раз превышает его номинальный ток. Физически, причина обусловлена низким сопротивлении обмоток электрической машины в предпусковой момент. При приложении номинального напряжения к малому сопротивлению, ток имеет большое значение:
Известно, что пусковой ток асинхронного двигателя с короткозамкнутым ротором в 5-7 раз превышает его номинальный ток. Физически, причина обусловлена низким сопротивлении обмоток электрической машины в предпусковой момент. При приложении номинального напряжения к малому сопротивлению, ток имеет большое значение:
I=U/R (1)
В идеальном случае если R стремится к нулю, то I стремится к бесконечности. В реалии же, ток достигает 5-7 кратного значения. В процессе разгона двигателя, сопротивление обмоток повышается до номинального уровня, а ток соответственно снижается. Передача энергии из сети в момент запуска электродвигателя:
E=P*t=U*I*t (2)
Из выражения (2) можно сделать вывод, что параметры U, I, t могут быть изменены, таким образом, что передаваемая из сети энергия Е останется неизменной. Это выражение справедливо только для приводов с небольшой нагрузкой на валу, например привод вентилятора.
Использование устройств плавного пуска двигателей (УПП). При использовании УПП для ограничения пусковых токов выражение (1) будет действовать на выходе устройства, а выражение (2) на его входе. В основу регулирования напряжения в современных софтстартерах (другое название УПП) лежит свойство тиристоров ограниченно пропускать электрический ток, в зависимости от напряжения, приложенного к управляющему электроду.
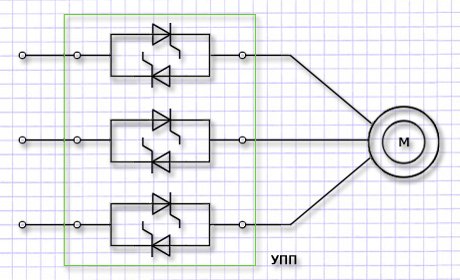
Для работы тиристоров в сетях переменного напряжения, их включают встречно в параллельных ветвях, а управляющее напряжение подается на общий электрод. Такое устройство называется симистор, устанавливается он в каждом проводе трехфазной системы.
При протекании пусковых токов через полупроводниковые элементы на них выделяется значительное количество тепла. Для отвода тепла применяют радиаторы, значительно увеличивающие вес, габариты и стоимость устройства.
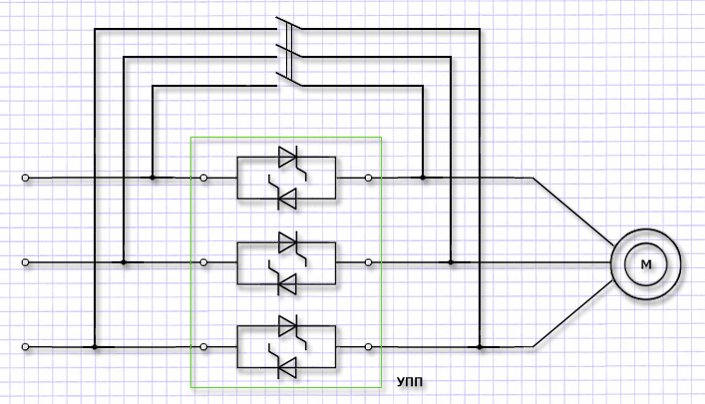
Другое решение проблемы - это использование схем с подключением шунтирующего контактора. После завершения пускового процесса, его контакты замыкаются, создавая параллельную цепь с меньшим сопротивлением, чем у полупроводников. Ток протекает по пути наименьшего сопротивления, а симисторы в это время остывают.
Современные УПП собраны на микропроцессорной базе, позволяющей существенно расширить функциональность, по сравнению с аналоговыми устройствами плавного пуска. Регулирование напряжения на зажимах электродвигателя осуществляется в функции тока. Это означает, что величина управляющего напряжения симисторов строго дозируется программой, в зависимости от величины тока, протекающей в обмотках.
Регулирование в функции тока позволяет избежать перегруза питающей сети, а значит, появляется возможность экономить на сечении питающего кабеля, мощности трансформатора и габаритах распределительного устройства.
Функциональные возможности УПП во многом совпадают с частотными преобразователями, также используемыми в электроприводе, однако стоимость последних в разы превышает стоимость УПП. Современные устройства могут иметь дополнительные функции, как то: защита от перегруза, от перекоса фаз, неправильного чередования фаз, защита от малых токов (при кавитации в насосах), и пр.
Возможность регулирования напряжения позволяет тормозить двигатель, запускать его при повышенной нагрузке, экономить электроэнергию при установившемся режиме при небольшой нагрузке. Основным достоинством УПП является их невысокая стоимость в сравнении с “частотниками”.
Недостатки:
- необходимость согласовывать включение УПП с защитными коммутационными аппаратами - само по себе устройство не защищено от токов коротких замыканий, протекающих через него;- при увеличении пускового времени с помощью УПП есть необходимость применения в цепи специальных автоматов с отстройкой теплового расцепителя по времени;- снижение пускового напряжения неизбежно ведет к снижению пускового момента, УПП применяют только в приводах с небольшой нагрузкой на валу;- влияние наличия полупроводниковых элементов на качество напряжения в сети.