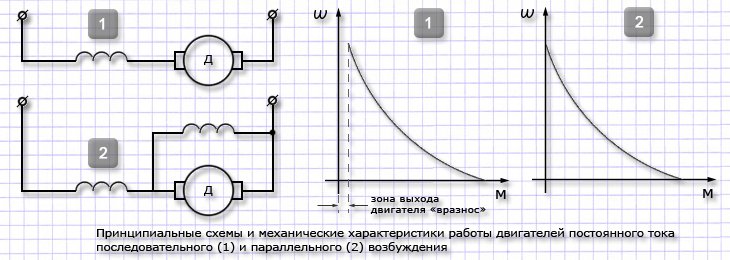
Особенности характеристики тягового привода, ее сходство с характеристиками ДПТ смешанного и последовательного возбуждения. Пример - вагон трамвая
Транспортный тяговый электропривод имеет некоторые особенности. Рассмотрим их на примере тягового привода вагона городского трамвая. В первый момент, когда вагон находится в состоянии покоя, статический момент сопротивления работе привода очень велик. Чтобы оценить это, попробуйте сдвинуть с места любую тяжелогруженую тележку на колесном ходу. Это совсем не просто, даже если тележка стоит на ровном месте.
 Но вот после пуска, когда вагон уже набрал некоторую скорость, в дело вмешиваются силы инерции. Большая масса (около 18 тонн) способна уже сама поддерживать некоторую скорость. Чрезмерное усилие для продолжения движения уже не нужно. Поэтому от двигателя требуется уже не столько момент, сколько повышенная частота оборотов в минуту.
Но вот после пуска, когда вагон уже набрал некоторую скорость, в дело вмешиваются силы инерции. Большая масса (около 18 тонн) способна уже сама поддерживать некоторую скорость. Чрезмерное усилие для продолжения движения уже не нужно. Поэтому от двигателя требуется уже не столько момент, сколько повышенная частота оборотов в минуту.
На автомобилях с двигателем внутреннего сгорания эта проблема решается установкой коробки переменных передач: на большей скорости необходимо другое передаточное отношение, в меньшей степени нагружающее двигатель и позволяющее ему работать на более высоких оборотах.
Получается, что механическая характеристика тягового привода отличается тем, что она приближается к осям скорости и момента, принимая вид гиперболы. Статический момент сопротивления привода резко возрастает при снижении скорости и столь же резко падает по мере разгона.
Фактически на больших скоростях сопротивление практически отсутствует: упомянутый вагон бежит сам, даже если его двигатели совсем отключить от сети. В теории тягового электропривода такое движение называют «свободным выбегом».
Тяговый электропривод коробкой переменных передач не оснащают. Причина заключается в том, что существует электрические двигатели практически идеально подходящие по своим характеристикам для работы в составе тягового привода. Речь идет о двигателях постоянного тока смешанного и последовательного возбуждения.
Как следует из названия, особенность этих двигателей состоит в том, что как минимум часть обмотки их возбуждения включается в цепь последовательно с обмоткой якоря. Из теории электрических машин известно, что на больших оборотах постоянные двигатели потребляют меньший ток в якорной цепи.
Это приводит к уменьшению момента на валу двигателя. И если для двигателей параллельного и независимого возбуждения есть просто пропорциональная зависимость между оборотами и моментом, то у двигателей последовательного и смешанного возбуждения все несколько сложнее.
Ведь ток якоря для этих двигателей одновременно является и током возбуждения – цепь-то одна, и деться просто некуда. Соответственно, при снижении тока в якорной цепи, снижается и ток возбуждения. А уменьшение тока возбуждения тоже со своей стороны ведет к возрастанию скорости двигателя и снижению момента. Теоретическое обоснование этому факту можно найти в любом учебнике по электрическим машинам.
Таким образом, при возрастании скорости двигателей последовательного и смешанного возбуждения происходит уменьшение их момента сразу по двум причинам: возрастание сопротивления якорной цепи и снижение тока в обмотке возбуждения. И, конечно, зависимость между моментом двигателя и его скоростью получается уже не пропорциональной.
Характеристика теряет свою жесткость и приобретает вид, свойственный тяговому электроприводу: очень большой момент при малых скоростях и практически отсутствующий момент на скоростях больших.
Именно поэтому для тягового электропривода и применяются двигатели постоянного тока смешанного и последовательного возбуждения. Разница же между ними заключается в том, что характеристика двигателя последовательного возбуждения не имеет пересечения с вертикальной осью скорости при нулевом моменте.
Поэтому, двигатель последовательного возбуждения категорически нельзя запускать без нагрузки: он разгонится до очень большой скорости («пойдет вразнос»), и скорость эта приведет к механическим разрушениям. У двигателей же смешанного возбуждения есть предельная скорость холостого хода и для них пуск без нагрузки не так страшен.