Широкое распространение в использовании асинхронных двигателей связано прежде всего с их надежностью, простотой в эксплуатации и обслуживании и относительно невысокой стоимостью. Однако, серьезным недостатком этих электрических машин является сложность регулирования скорости вращения вала и привода в целом.
Изменение производительности исполнительных механизмов при помощи промежуточных звеньев и запорной арматуры является далеко не экономичным способом, так как потребление энергии из сети остается на прежнем уровне, общий КПД такой установки снижается.
Не лучшим вариантом регулирования скорости вращения вала электромотора, является и изменение напряжения питающей сети. Так как при этом, в квадратичной зависимости изменяется момент на валу двигателя.
Безусловно, одним из самых эффективных и экономичных способов регулирования скорости электропривода, в настоящее время стало частотное преобразование питающего напряжения.
Принцип такого регулирования объясняется следующим соотношением:
n_1=(f*60)/p;
n1 – скорость вращения магнитного поля статора;f – частота напряжения питающей сети;р – количество пар полюсов; для двухполюсного двигателя р=1.
Из формулы видно, что изменять скорость вращения магнитного поля статора, а соответственно и ротора, можно изменив количество пар полюсов двигателя или частоту питающей сети. Частотное регулирование достигается изменением частоты и амплитуды напряжения на нагрузке.
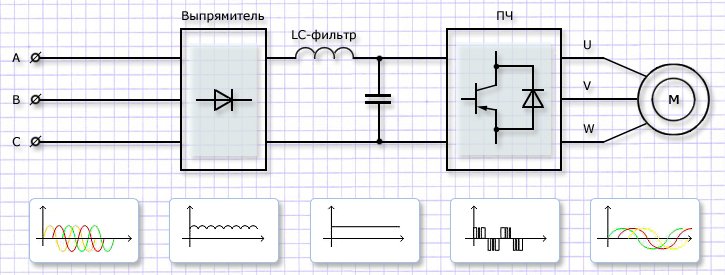
Выходное напряжение ПЧ представляет собой серию импульсов различной ширины и амплитуды, полученную в результате открывания и закрывания ключей по заданному алгоритму. Угловатость выходных импульсов сглаживается благодаря индуктивности обмоток двигателя, в результате выходное напряжение отдаленно напоминает синусоиду.
Различают два класса ПЧ: с непосредственной связью и явно выраженным промежуточным звеном постоянного тока. ПЧ со звеном постоянного тока, состоят из полупроводникового выпрямителя, LC-фильтра, инвертора и блока управления. На первой ступени срезается отрицательная полуволна синусоиды напряжения. LC-фильтр устанавливается для сглаживания пульсаций, выпрямленного напряжения.
Для формирования синусоидального напряжения на выходе ПЧ применяют инверторы, собранные на запираемых тиристорах или биполярных транзисторах. Современные тиристоры марок GTO, GCT, IGCT и SGCT наиболее предпочтительны к использованию, ввиду их большей устойчивости к высоким напряжениям и большим токам.
КПД преобразователей собранных на тиристорах более высокий в сравнении с преобразователями на базе транзисторов. В основе блока управления находится микропроцессор, управляющий электронными ключами инвертора. Алгоритм работы управляющего микропроцессора основывается на широтно-импульсной модуляции (ШИМ) или векторном управлении.
ПЧ с непосредственной связью имеют более простую структуру. В этом случае электропривод представляет собой управляемый выпрямитель. Силовые электронные ключи в фазах отпираются в соответствии с заданным алгоритмом, поочередно подключая двигатель к сети. Таким образом на выходе ПЧ напряжение представляет собой совокупность отрезков синусоиды входного напряжения.
В этом случае частота на выходе не может быть равной или больше частоты на входе, и находится в пределах от 0 до 30 Гц. Столь малый диапазон регулирования не позволяет широко применять ПЧ с непосредственной связью.
Кроме этого “резанная синусоида” на выходе является мощным источником токов высших гармоник, что приводит к дополнительным потерям в двигателе и ухудшению качества напряжения в общей сети. Этот недостаток является общим для всех видов преобразователей на базе полупроводниковых элементов.
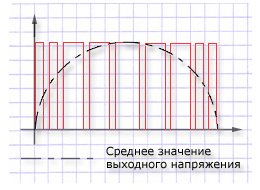 Принцип работы ШИМ заключается в изменении напряжения на выходе путем изменения скважности сигналов с помощью управляющего ключа. Частота импульсов одинаковая, а скважность (иначе говоря - отношение периода следования к длительности) - переменная.
Принцип работы ШИМ заключается в изменении напряжения на выходе путем изменения скважности сигналов с помощью управляющего ключа. Частота импульсов одинаковая, а скважность (иначе говоря - отношение периода следования к длительности) - переменная.
Как уже было сказано, на входе ШИМ напряжение постоянное, по отношению к устройству оно будет модулируемое. При импульсах управляющего ключа в виде “пилы” или “треугольника” длительность и частота импульсов на выходе соответствует частоте зубьев “пилы”.
В последнее время наибольшее распространение получило векторное управление электродвигателями. Входными параметрами при векторном управлении являются мгновенное значение тока, скорость вращения ротора, модуль и угол вектора потокосцепления. Данный способ предусматривает регулирование привода по моменту на валу и по потокосцеплению.
Векторное управление позволяет поддерживать максимальное значение момента на валу, соответствующее перпендикулярному расположению векторов тока и потокосцепления. Приводы с векторным управлением считаются самыми энергоэффективными, имея достаточно широкий диапазон регулирования при высоких динамических характеристиках.