 Несмотря на большое разнообразие конструкций электродвигателей, совершенно ясно, что принцип их работы всегда один и тот же. Переменное электромагнитное поле, создаваемое статорной обмоткой или обмоткой возбуждения, вступает во взаимодействие с электрическим током, проходящим в цепи ротора или в якорной цепи.
Несмотря на большое разнообразие конструкций электродвигателей, совершенно ясно, что принцип их работы всегда один и тот же. Переменное электромагнитное поле, создаваемое статорной обмоткой или обмоткой возбуждения, вступает во взаимодействие с электрическим током, проходящим в цепи ротора или в якорной цепи.
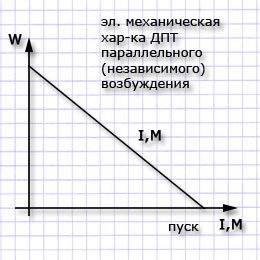
Взаимодействие поля и тока формирует электромагнитный момент, который и приводит во вращение рабочий вал двигателя. Чтобы убедиться в общности принципов работы, достаточно взглянуть на рабочие участки механических характеристик асинхронного двигателя (АД) и двигателя постоянного тока (ДПТ) параллельного или независимого возбуждения.
Это совсем разные электрические машины, но сходство характеристик может показаться удивительным. Есть лишь несколько «но». Например, в характеристике АД имеется точка, соответствующая «моменту опрокидывания». Эта точка соответствует пределу нагрузочных способностей двигателя – больше этого момента он развить не может.
В то же время, характеристика ДПТ не имеет никаких критических точек. Скорость вращения его вала просто линейно уменьшается по мере увеличения нагрузки вплоть до полной остановки при «запредельном» значении момента сопротивления.
Кстати, именно для того, чтобы исключить работу ДПТ при таких больших нагрузках, для них часто формируется так называемая «экскаваторная» искусственная характеристика, предполагающая отсечку по току якоря.
Но почему же у АД отсечка по моменту фактически имеется уже в естественной характеристике? Почему наперекор общим принципам работы, в характеристике этого двигателя имеется такой странный провал?
Все дело в особенностях работы в цепи переменного тока. Ведь электромагнитный момент создается не просто при взаимодействии поля статора и тока ротора.
В процессе участвует не весь ток, а только его активная составляющая, то есть та, которая совпадает по фазе с ЭДС ротора. Реактивная же составляющая не создает никакого момента, попусту нагружая роторную цепь.

Интересно то, что взаимное соотношение величин этих составляющих непостоянно по мере пуска двигателя. Величина реактивной составляющей зависит от реактивного (индуктивного) сопротивления ротора. Чем больше индуктивное сопротивление, тем более реактивным является ток, тем больше сдвиг фаз между ним и ЭДС.
Соотношение, позволяющее определить индуктивное сопротивление, известно давно:
X=2πfL;
Параметр L (индуктивность цепи) здесь является неизменным. Иное дело – частота f. В роторной цепи она достигает максимальной величины в первый момент пуска, когда ротор неподвижен. Это 50 герц, частота сети.
При этом, поскольку частота максимальна, то и реактивная составляющая тока достигает своего максимума. При этом момент, конечно, не особенно велик по причинам, о которых мы говорили выше. Таким образом, получается, что при больших пусковых токах любой АД обеспечивает посредственный пусковой момент.
По мере разгона ротора частота тока в нем снижается из-за того, что снижается относительная скорость вращения электромагнитного поля. Снижается и реактивная составляющая тока ротора, а это приводит к тому, что при относительно малом токе двигатель может развить больший момент.
По достижении током частоты в несколько герц двигатель выходит на рабочую характеристику и достигает подсинхронной скорости вращения. Но при увеличении нагрузки до момента опрокидывания скорость снова снизится до такой степени, что реактивная составляющая тока ротора начнет преобладать.
Это приведет к тому, что при растущем токе момент двигателя уже не сможет повышаться и двигатель встанет в режиме короткого замыкания.
Наличие реактивной составляющей в токе роторной цепи – это причина главного отличия между характеристиками ДПТ параллельного возбуждения и АД.